Scoping the Motor Controllers
Verifying The Motor Controllers
Before we can drive the motors, we need to verify that our motor controllers are working and that we know how to control them with the Artemis Nano.
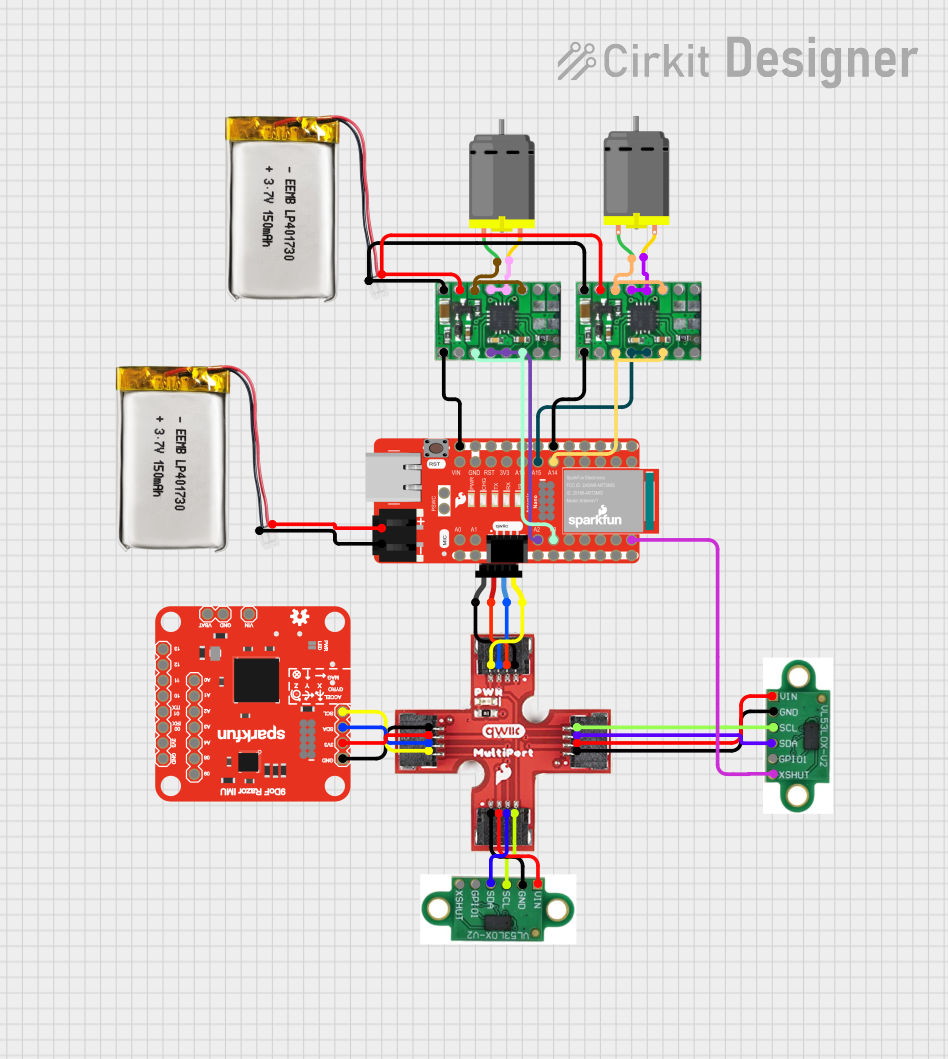
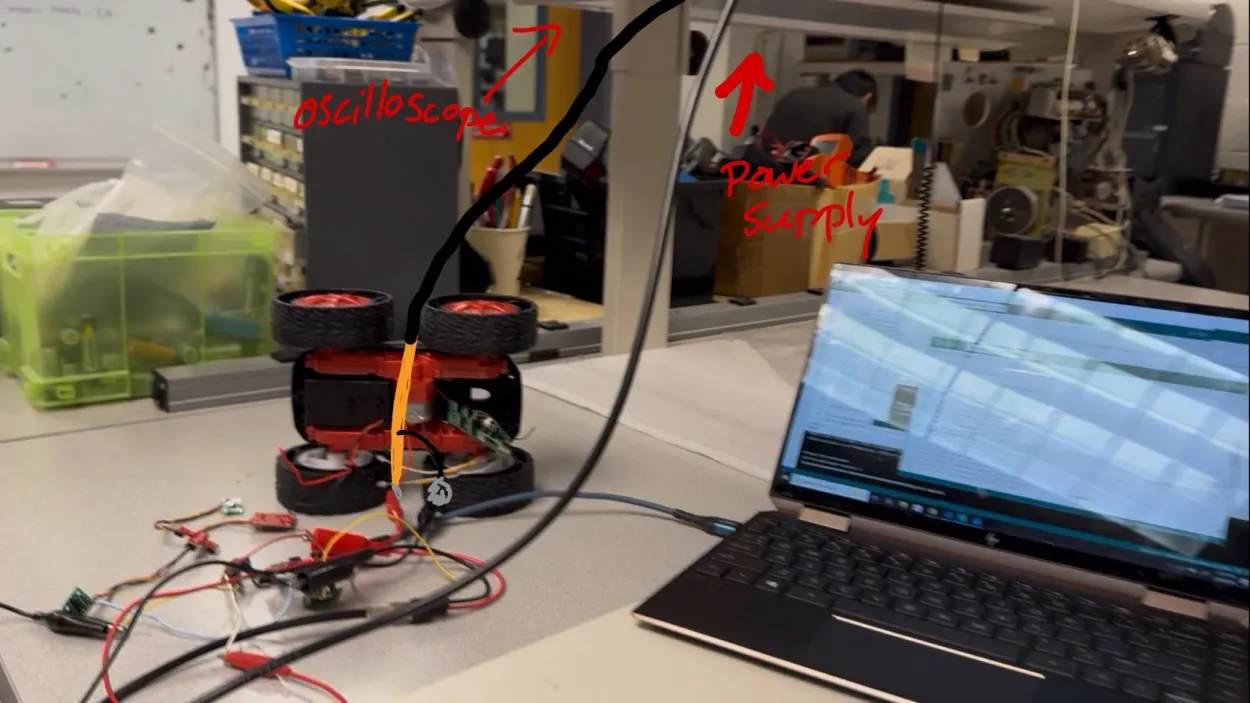
We can power the motor drivers with a power supply and connect the input pins to the Artemis Nano, and then use the Arduino IDE to send PWM signals to the motor drivers and look at the output signals on the oscilloscope.
From the datasheet of the DRV8833, we know that the maximum average current for one channel is 1.2A, so we will use a power supply that can provide at least 2.4A at 3.7V to power a motor at full speed since each motor uses two channels.
While I don't have a picture of the setup connected to the oscilloscope, I have drawn a modification from the testing setup for testing the motors moving using an external power supply.
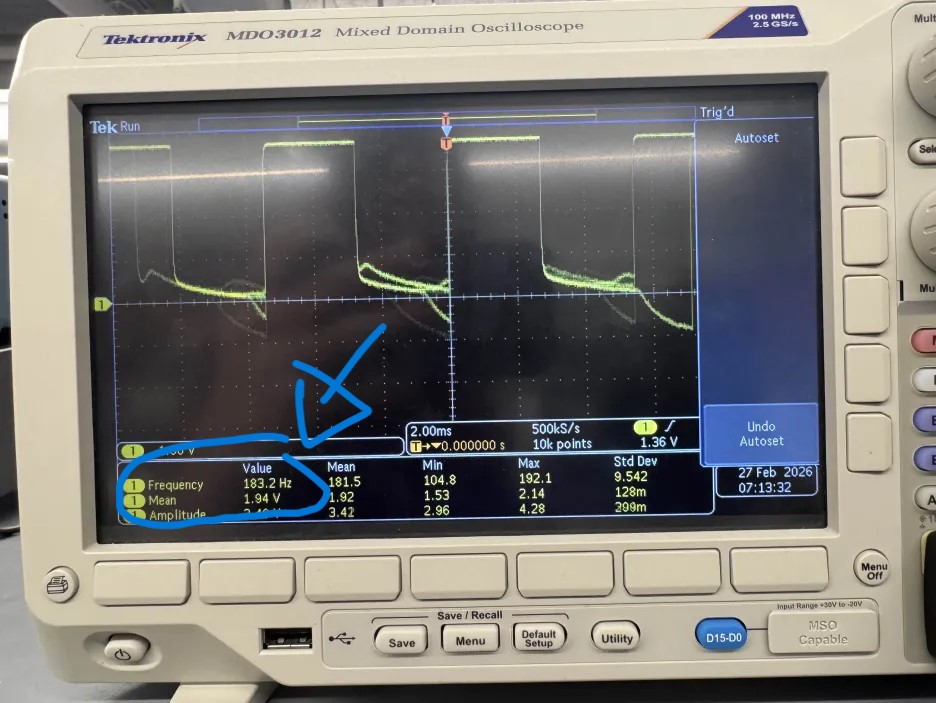
 Here we have an output from the oscilloscope showing the motor output signals and the code to test shown below:
Here we have an output from the oscilloscope showing the motor output signals and the code to test shown below:
#define LEFT1 3
#define LEFT2 2
#define RIGHT1 14
#define RIGHT2 15
void setup() {
Serial.begin(115200);
pinMode(LEFT1, OUTPUT);
pinMode(LEFT2, OUTPUT);
pinMode(RIGHT1, OUTPUT);
pinMode(RIGHT2, OUTPUT);
analogWrite(LEFT2, 0);
analogWrite(LEFT1, 128);
analogWrite(RIGHT2, 0);
analogWrite(RIGHT1, 0);
}
For our testing, we used a PWM signal with a 50% duty cycle on one input, and a zero signal on the other input of the motor driver.
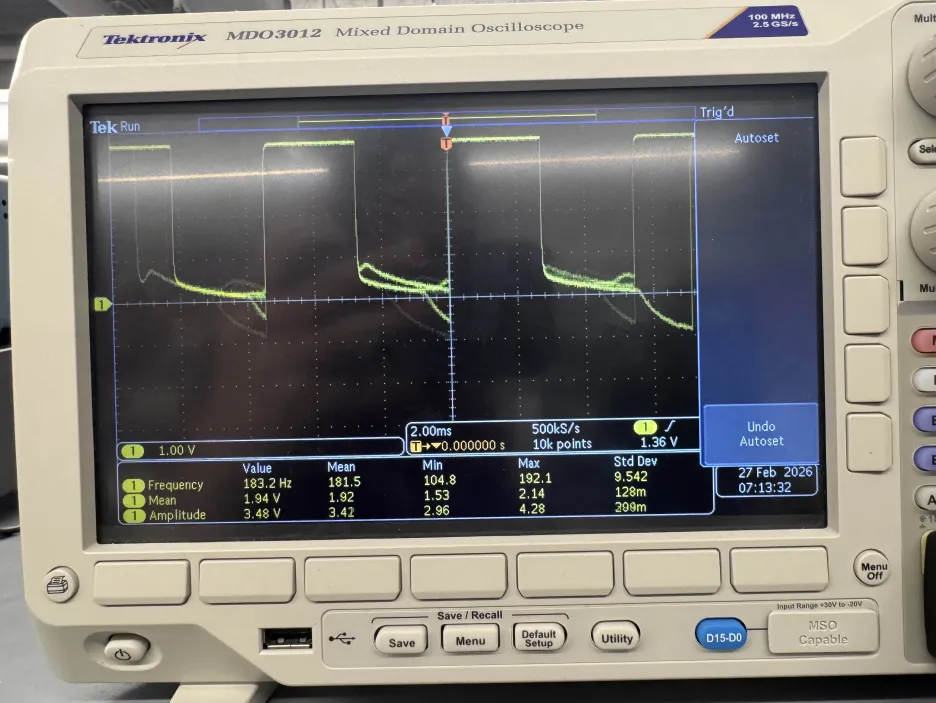
As we can see from the oscilloscope output, we get a clean-ish PWM signal with a 50% duty cycle on the output, which is what we expect to see. We can also see that the average voltage is 1.94V which is around 50% of the 3.7V supply voltage, which is also what we expect to see.
Towards the end of the signal we can see some noise and a slower decay, which is most likely due to parastic capacitances in the circuit, causing it to take some time to discharge to 0V.
Overall, this shows that we can control the motor drivers with PWM signals from the Artemis Nano, and we can use this to drive our motors.
However, I also wanted to test how the signal would behave if I ran the same program but switching which input pin was high and which was low.
The results of that test are shown below:
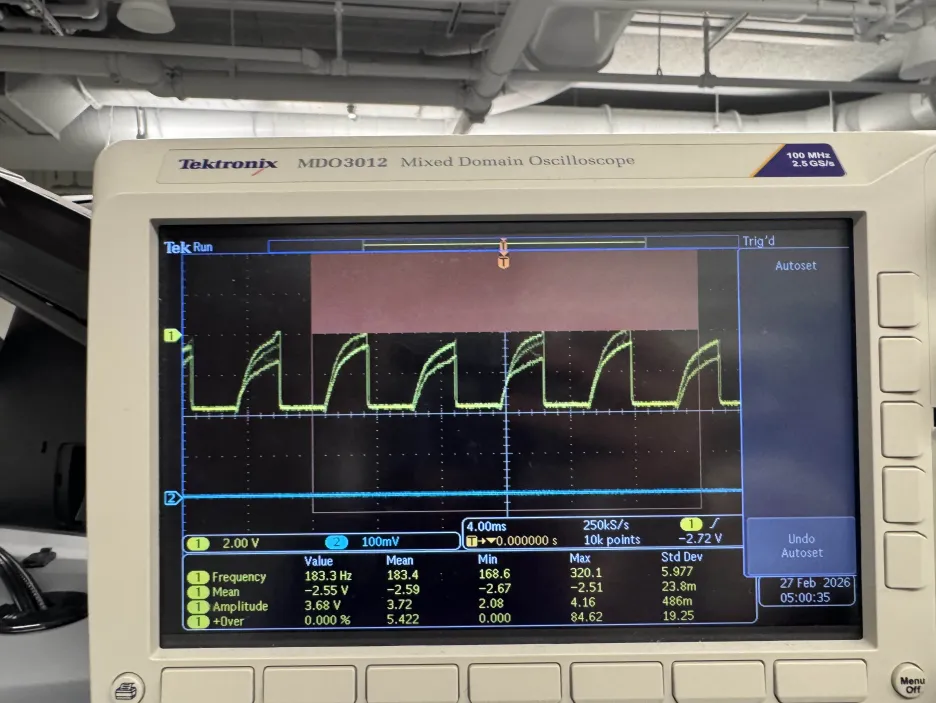
As we can see, this produces a much noisier output which is strange since the electrical connections are the same. My best hypothesis is that it is EMI from the motor driver or maybe a loose solder connection to the high input pin,
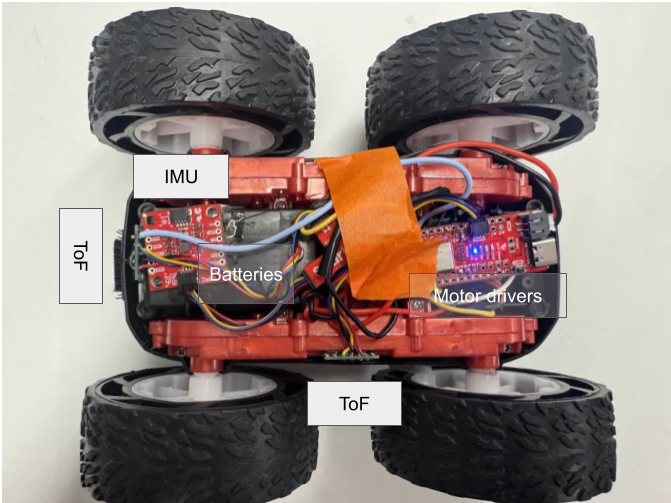
but I wanted to test if this would affect the performance of the actual motor. I then connected the output pins of the driver to the motors using alligator clips (which is what the picture above is depicting), and I found that it had no problem running
with both configurations, so I am not too concerned.