AGAIN?!?!?!
Fourier Transform of IMU Data
We can also perform a Fourier transform on the data to analyze the frequency content of the IMU data. This can be useful for identifying patterns or
vibrations in the data that may not be visible in the time domain. Below is the code used to perform the Fourier transform on the pitch data from the IMU.
This code was adapted from the PDM microphone FFT code provided in Lab 1. "Processing buffer" is the list of angle values and this outputs the magnitudes of the frequency components in the "magnitudes" array.
arm_rfft_fast_instance_f32 S;
arm_rfft_fast_init_f32(&S, FFT_SIZE);
arm_rfft_fast_f32(&S, processingBuffer, fft_output, 0);
arm_cmplx_mag_f32(fft_output, magnitudes, FFT_SIZE / 2);
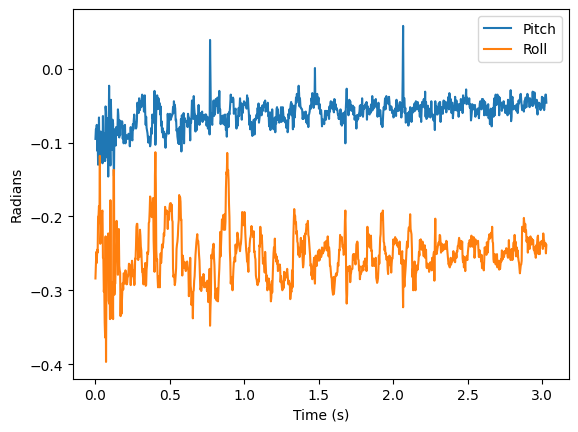
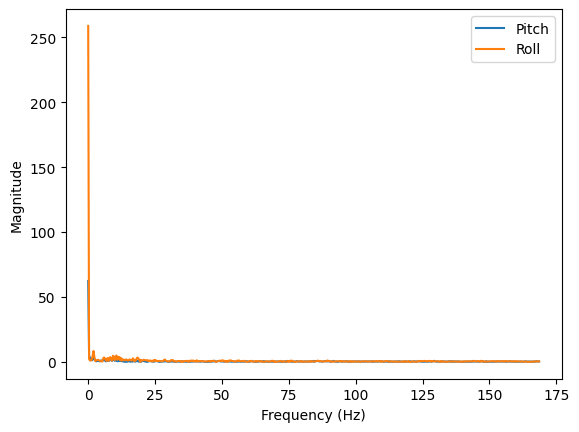
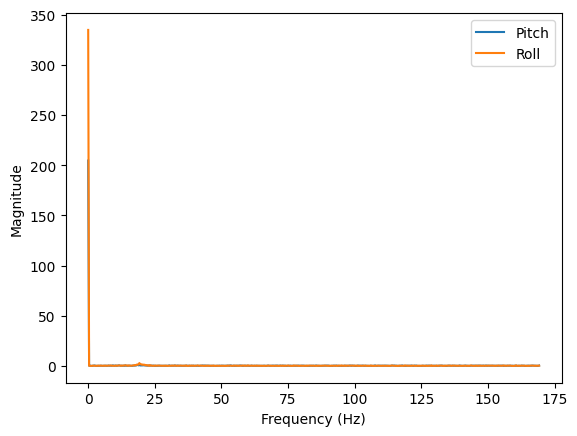
Below are plots of of the Fourier transform of the pitch data when the IMU is when it is being shaken due to nearby car movement, when it is stationary, and being shaken by the table.
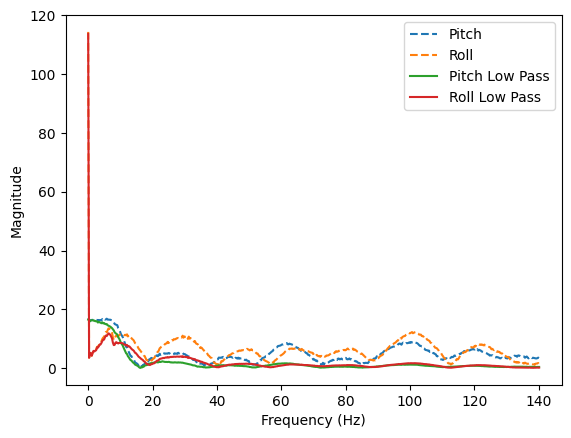
When the IMU is being shaken by a car's movement, we can see that the fourier transform mostly consists of a DC offset and the other major components decay mostly by about 13Hz, which is what we will use for our cutoff frequency in a lowpass filter.
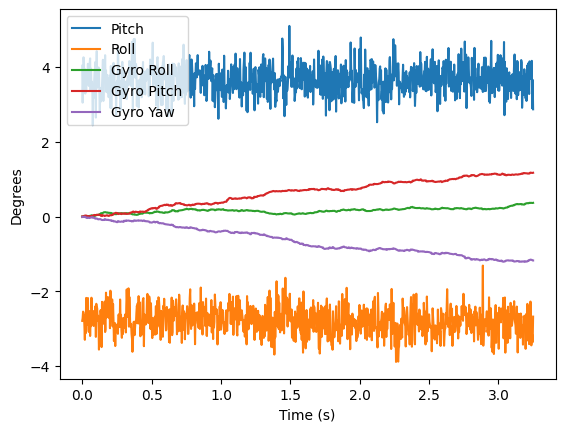
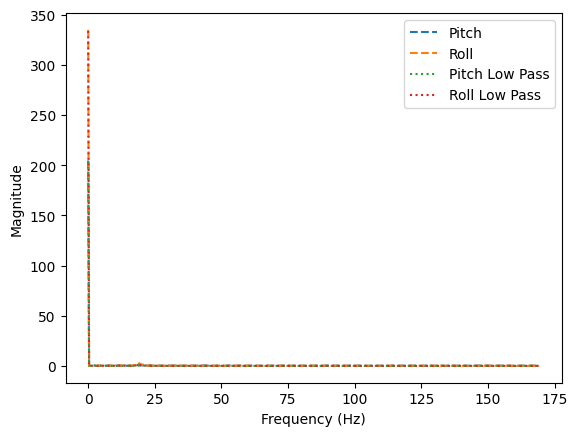
When the IMU is stationary, we can see that the fourier transform consists of a large DC offset and the other frequency components are mostly very small, which is what we would expect for stationary data with some noise.
However, we want to eliminate some of this noise to get a more accurate reading of the pitch and roll angles, so we will implement a lowpass filter with a cutoff frequency of around 13Hz to filter out the high frequency noise in the data.
We can implement a lowpass filter by applying the equations from lecture by treating our data as an RC circuit as shown below:
float cutoff_freq = 13.0; // desired cutoff frequency in Hz
float sample_freq = pitchSampleCount/((timeStampArray[pitchSampleCount-1] - timeStampArray[0])/1000); // sampling frequency in Hz (number of IMU samples collected per second)
float dt = 1.0 / sample_freq;
float RC = 1.0 / (2 * M_PI * cutoff_freq);
float alpha = dt / (RC + dt);
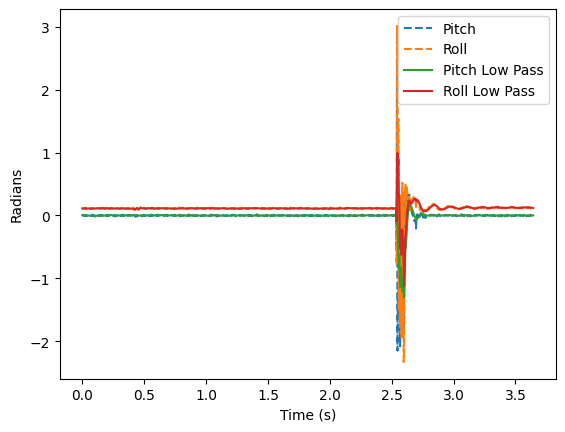
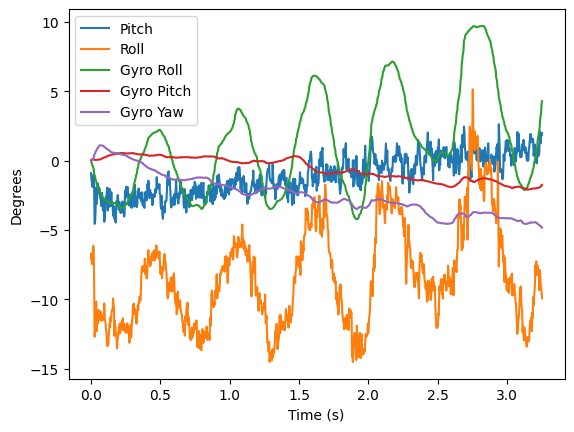
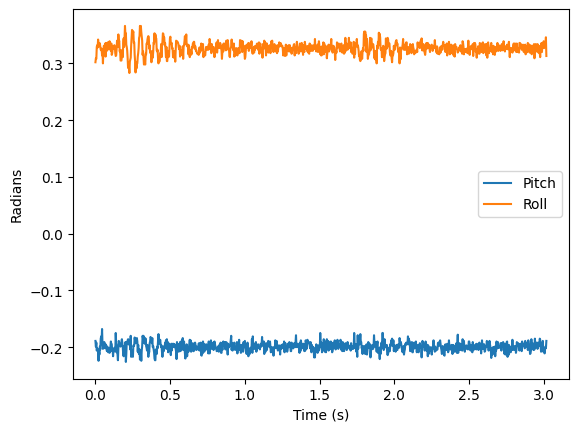
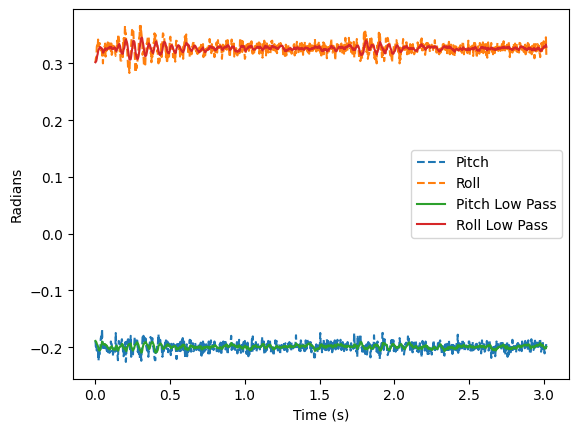
Applying this to our stationary data, we can see that the lowpass filter significantly reduces the noise in the data, allowing us to get a more accurate reading of the pitch and roll angles.
We can also see that the lowpass filter preserves the general shape of the data, which is what we would expect since the cutoff frequency is high enough to preserve the main frequency components of the data while filtering out the high frequency noise.
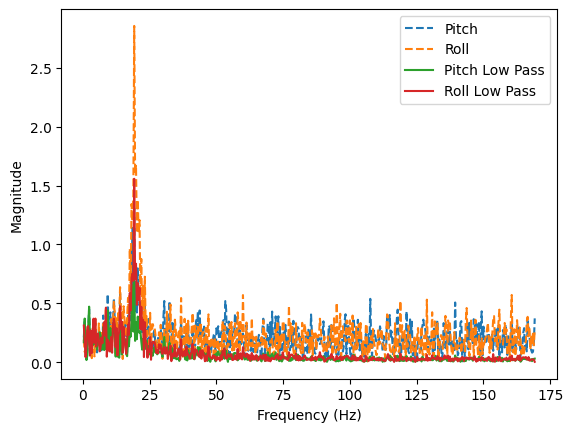
Zooming in on the FFT data without the DC component, gives us a better view of the frequency components in the data. We can see that the lowpass filter significantly reduces the magnitude of the frequency components above the cutoff frequency, greatly reducing the noise.
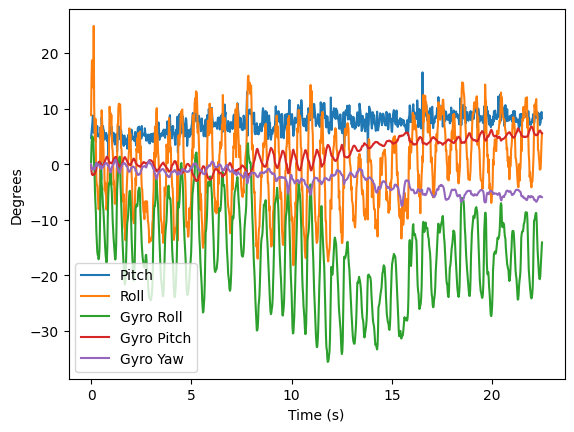
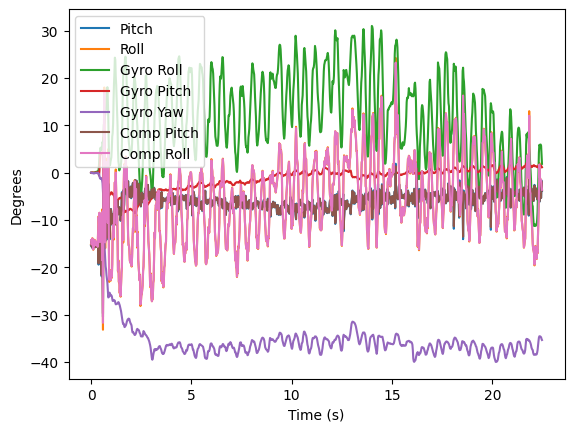
We also tested the robustness of the IMU and lowpass filter by shaking the table that the IMU is on. We can see that the lowpass filter significantly reduces the noise in the data, allowing us to still get a reasonable reading of the pitch and roll angles even when the IMU is being shaken by the table.
The low pass filter reduced the magnitude of the shake as shown below: