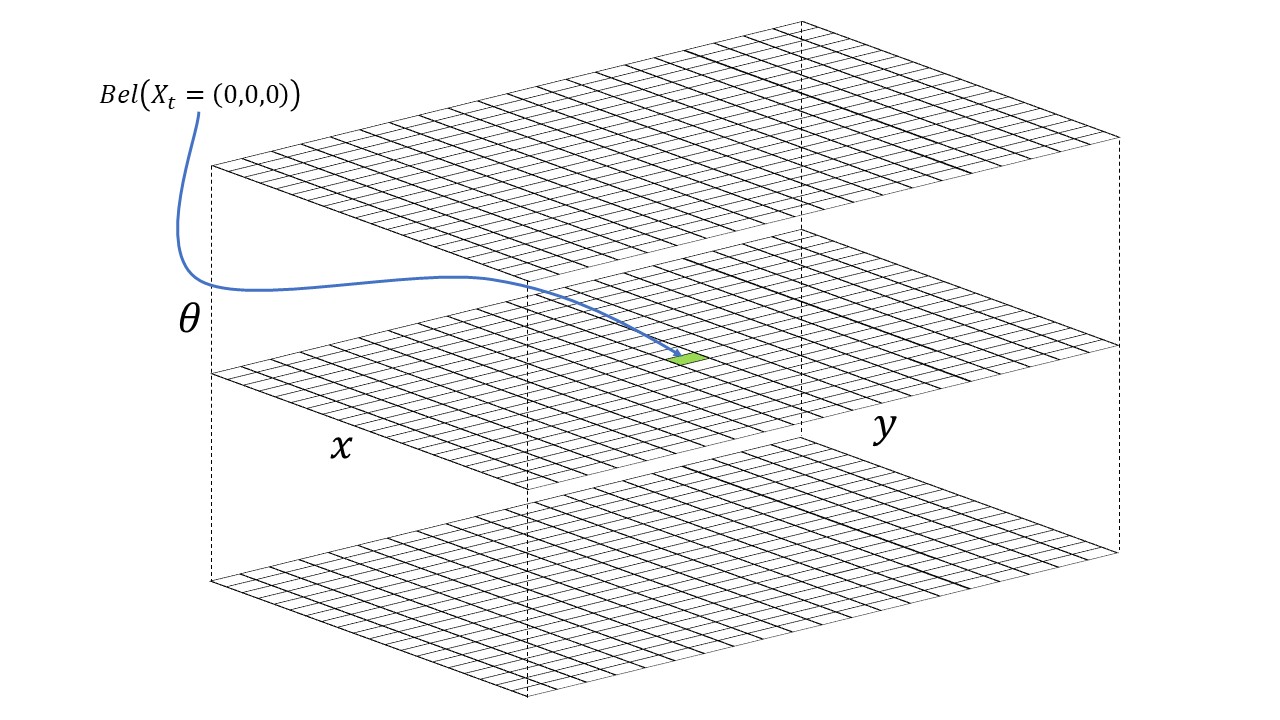
Where Da Robot At? (probably)
Odometry and Motion Model
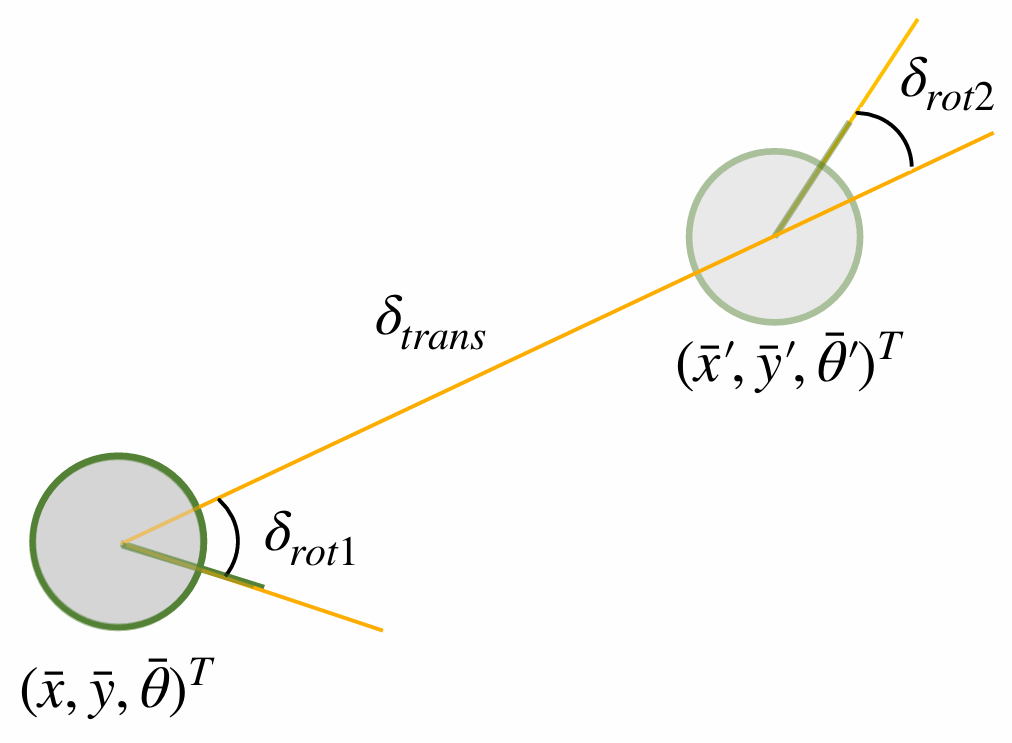
We will use an odometry based motion model. We model our control input as the desired change in position and orientation of the robot,
specified by \({\delta}_{trans}\), \(\delta_{rot1}\), \(\delta_{rot2}\) which represent the change in translation, the change in rotation before translation, and the change in rotation after translation respectively.
 To input this form of odometry into our motion model, we need to convert our poses into the form of \({\delta}_{trans}\), \(\delta_{rot1}\), \(\delta_{rot2}\). This is done using the code below where pose is in the form of [x, y, theta].
To input this form of odometry into our motion model, we need to convert our poses into the form of \({\delta}_{trans}\), \(\delta_{rot1}\), \(\delta_{rot2}\). This is done using the code below where pose is in the form of [x, y, theta].
def compute_control(cur_pose, prev_pose):
cur_pose = np.array(cur_pose)
prev_pose = np.array(prev_pose)
delta_trans = np.linalg.norm(cur_pose[:2] - prev_pose[:2])
horizontal_angle = np.arctan2(cur_pose[1] - prev_pose[1], cur_pose[0] - prev_pose[0]) * 180 / np.pi
delta_rot_1 = horizontal_angle - prev_pose[2]
delta_rot_1 = mapper.normalize_angle(delta_rot_1)
delta_rot_2 = cur_pose[2] - horizontal_angle
delta_rot_2 = mapper.normalize_angle(delta_rot_2)
return delta_rot_1, delta_trans, delta_rot_2
We can use a simple Gaussian motion model where we model our control input as a Gaussian distribution with mean at the control input and some variance to account for noise in our motion.
We can then calculate the probability of conducting the given movement by sampling the calculated odometry from this distribution. We assume that the motion in each direction is independent.
Multiplying the probabilities gives the probability of landing where at the new pose given the control input and previous pose (\(p(x_t | u_t, x_{t-1})\)).
The code for this is shown below.
def odom_motion_model(cur_pose, prev_pose, u):
theory_odom = compute_control(cur_pose, prev_pose)
theory_rot1, theory_trans, theory_rot2 = theory_odom
u_rot1, u_trans, u_rot2 = u
prob_rot1 = loc.gaussian(theory_rot1, u_rot1, loc.odom_rot_sigma)
prob_trans = loc.gaussian(theory_trans, u_trans, loc.odom_trans_sigma)
prob_rot2 = loc.gaussian(theory_rot2, u_rot2, loc.odom_rot_sigma)
return prob_rot1 * prob_trans * prob_rot2